

Touch <タッチ>は、ユーザーがPC上の仮想オブジェクトに触れて操作できる高精度の力覚インタラクションを実現するハプティクス デバイスです。
3次元オブジェクトと作業者の動的なインタラクションにおいて、視覚情報だけでなく力覚情報を加えることにより、物体に触れたときに手に伝わる反力をリアルに再現し、操作性を向上します。
3次元オブジェクトと作業者の動的なインタラクションにおいて、視覚情報だけでなく力覚情報を加えることにより、物体に触れたときに手に伝わる反力をリアルに再現し、操作性を向上します。
| 総可動範囲 | ~ 17 W x 13.7 H x 6.5 D in > 431 W x 348 H x 165 D mm |
|---|---|
| 作業領域 | ~6.4 W x 4.8 H x 2.8 D in > 160 W x 120 H x 70 D mm |
| 動作範囲 | 手首を中心に旋回する手の動き |
| 位置分解能 | > 450 dpi ~ 0.055 mm |
| 機械摩擦抵抗 | < 1 oz (0.26 N) |
| 最大提示力 (通常の直交アーム位置における) | 0.75 lbf (3.3 N) |
| 継続的提示力 (24 時間) | > 0.2 lbf (0.88 N) |
| 堅さ | X axis > 7.3 lbs / in (1.26 N / mm) Y axis > 13.4 lbs / in (2.31 N / mm) Z axis > 5.9 lbs / in (1.02 N / mm) |
| 台座サイズ (接地部分の面積) | 6 5/8 W x 8 D in ~168 W x 203 D mm |
| 力覚出力 | 3自由度 x, y, z |
| 位置・姿勢入力 | 6自由度 [スタイラスジンバル型] x, y, z (digital encoders) Pitch, roll, yaw (± 5% linearity potentiometers) |
| エンドエフェクタ | スタイラス型 |
※補足
総可動範囲:モーターの力を発揮することができる総可動範囲(モーターの力を100%の発揮することができない可動範囲を含む)
作業領域:モーターの力を100%発揮することができる可動範囲
総可動範囲:モーターの力を発揮することができる総可動範囲(モーターの力を100%の発揮することができない可動範囲を含む)
作業領域:モーターの力を100%発揮することができる可動範囲
Touch デバイス
- デバイス本体 / 1個
- 予備スタイラス / 1個
- USB ケーブル / 1本
- 電源アダプター及びケーブル / 各1個
医療シミュレータ開発用 – 当社オリジナル オプション (受注生産品)
※詳細は、営業担当者までお問い合わせください。多点接触シミュレーションシステム 剛(Tsuyoshi)

デバイス Touch×1 ソフトウェア SmartCollision Studio Viewer×1
力覚・ホワイトボード・キット 書(Sho)

デバイス Touch×1 ソフトウェア Phantom文字描画ソフト×1
ハプティクス通信制御開発用システム 連(Ren)
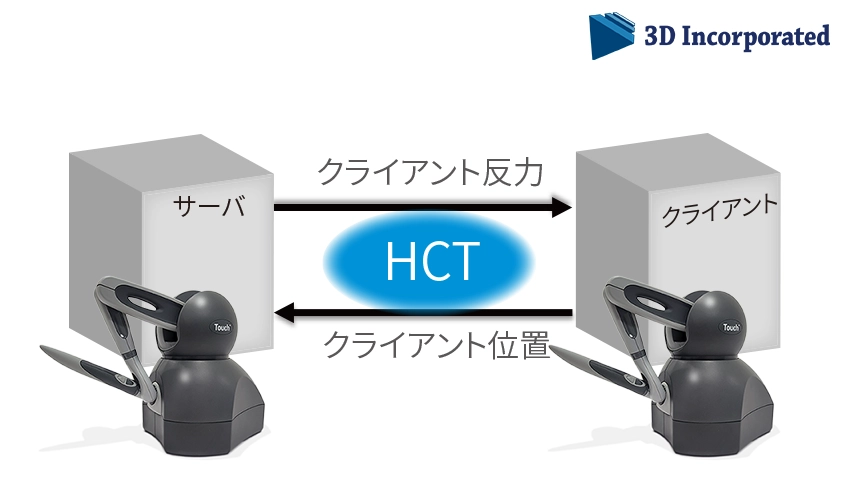
デバイス Touch×2 ソフトウェア Haptics Communication Toolkit×1