リアルタイム干渉計算ライブラリ SmartCollision <スマートコリジョン>
SmartCollision <スマートコリジョン>は、高精度な衝突判定と、衝突判定後の適切な処理(干渉の解消・力覚呈示)を実現することを可能にした、リアルタイム干渉計算ライブラリです。
設計・製造
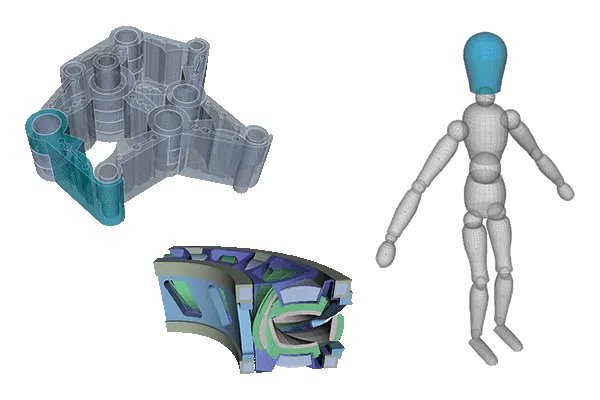
- CADデータ(自動車・電子機器・建築物など)の組立/分解性のリアルタイム動的検証
- 部品の分解・組立て可能性・手順・パスを検証
- 検証した分解・組立て手順をマニュアル化
- ロボットアーム/工具とその他の部品/環境との干渉シミュレーション
建築・土木
医療
- 手術シミュレーション
- 歯科臨床における治療支援シミュレーション
VR系教育・研究機関
- Polygon(三角形)で構成されたオブジェクト間の干渉を扱えるため設計データ(CADデータ)との親和性が高い
- インタラクティブなアプリケーションでの利用を目的とする”動的な”干渉計算が可能
- 干渉深度(干渉の度合い)の計算が可能なため力覚(ハプティクス)との親和性が高い
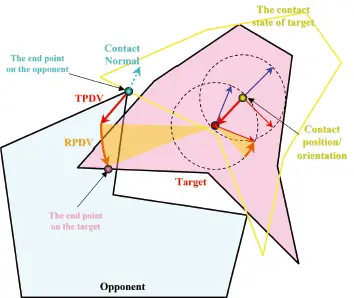
干渉深度計算 - Penetration depth computation
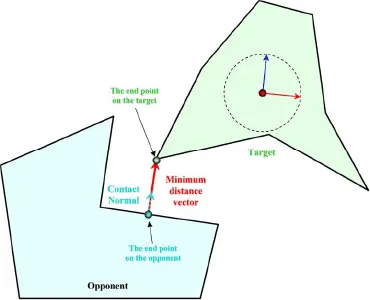
最近傍計算 - Minimum distance computation
| 製品 |
価格(税抜) |
| SmartCollision SDK for Windows スタンダードライセンス |
お問合せ下さい |
| SmartCollision SDK for Windows ランタイムライセンス |
お問合せ下さい |
※SmartCollision SDK を使用する際には「USB Key(ドングル)」が必要です。
※製品の価格は、営業担当者までお問い合わせください。
SmartCollision SDK サンプルソースコード
使用ライブラリ
Collision Detection Library: SmartCollisionSDK
Haptics Library: OpenHaptics ToolKit HDAPI(オプション)
Graphics Library: OpenGL, GLUT
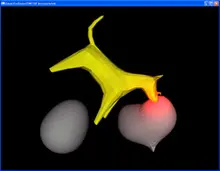
SmartCollision Viewer サンプルデータ
シーン構成
ポリゴン数:76,592
オブジェクト数:28