

3D Systems Phantom Premium 1.5 <ファントム プレミアム>は、ユーザーがPC上の仮想オブジェクトに触れて操作できる高精度の力覚インタラクションを実現するハプティクス デバイスです。
3次元オブジェクトと作業者の動的なインタラクションにおいて、視覚情報だけでなく力覚情報を加えることにより、物体に触れたときに手に伝わる反力をリアルに再現し、操作性を向上します。
3次元オブジェクトと作業者の動的なインタラクションにおいて、視覚情報だけでなく力覚情報を加えることにより、物体に触れたときに手に伝わる反力をリアルに再現し、操作性を向上します。
| 作業領域 | ~15 W x 10.5 H x 7.5 D inches > 381 W x 267 H x 191 D mm |
|---|---|
| 台座サイズ (接地部分の面積) | 13 W x 10 D inches ~330 W x 254 D mm |
| エンドエフェクタ | スタイラス型 オプション:6自由度エンコーダスタイラスジンバル |
| 動作範囲 | 肘を中心に旋回する前腕の動き |
| 位置分解能 | > 860 dpi ~ 0.03 mm |
| 機械摩擦抵抗 | < 0.15 oz (0.04 N) |
| 最大提示力 (通常の直交アーム位置における) | 1.9 lbf (8.5 N) |
| 継続的提示力 (24 時間) | > 0.3 lbf (1.4 N) |
| 堅さ | 20 lbf in-1 3.5 N mm-1 |
| 力覚出力 | 3自由度 x, y, z |
| 位置・姿勢入力 | 3自由度[スタイラス型] x, y, z (digital encoders) |
| インタフェース | IEEE1284 パラレル ポート |
※補足
作業領域:モーターの力を100%発揮することができる可動範囲
作業領域:モーターの力を100%発揮することができる可動範囲
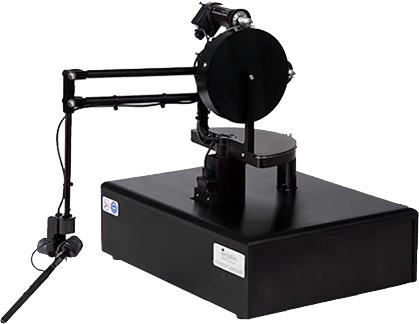 Encoder stylus gimble for 1.5 を装着した状態
Encoder stylus gimble for 1.5 を装着した状態Premium 1.5 デバイス (受注生産品)
- デバイス本体 / 1個
- スタイラス / 1個
- 指サック / 1個
- パラレル ケーブル / 1本
- 電源ケーブル / 各1個
- 操作マニュアル(英語版)
スタイラス 入力6自由度 – メーカー オプション (受注生産品)
- Encoder stylus gimble for 1.5 姿勢入力 3自由度 Pitch, roll, yaw (±5%)