

3D Systems社製 ハプティクス デバイスは、ユーザーがPC上の仮想オブジェクトに触れて操作できる高精度の力覚インタラクションを実現するデバイスです。
3自由度モデルと6自由度モデルがあります。
3次元CGオブジェクトと作業者の動的なインタラクションにおいて、視覚情報だけでなく力覚情報を加えることにより、物体に触れたときに手に伝わる反力をリアルに再現し、操作性を向上します。
3次元CGオブジェクトと作業者の動的なインタラクションにおいて、視覚情報だけでなく力覚情報を加えることにより、物体に触れたときに手に伝わる反力をリアルに再現し、操作性を向上します。
ロボット
- 遠隔ロボット制御(スレーブやマスターの力覚デバイスとして)
医療・リハビリ
- 外科手術リハーサルシステム
- リハビリテーション、トレーニングシステム
- 視覚障害者のためのアプリケーション
バイオ
- 分子モデリング
- ナノマニピュレーション
VR・教育
- 製品デザイン、デザイナ向けのインタラクティブ・デバイス
- 力覚インタラクションによるユーザーインタフェース
設計・製造
- 3Dモデリング、干渉チェック
- 仮想アセンブリ、プロトタイピング
- 微細作業にも用いることができる3~6自由度の位置センサを搭載
- DCモータを用いたトルク制御により3~6自由度のフォースフィードバック機構(力覚)を搭載
- 瞬間最大提示力は、~37.5Nものタイプもあり、堅いCGオブジェクトに触れたような表現に有効
- 入出力制御更新レートは、1kHzもの高速処理を実現
Touch <タッチ>

作業領域 160W x 120H x 70Dmm 最大提示力 3.3 N 継続的提示力 0.88 N 力覚出力 3自由度 位置・姿勢入力 6自由度
Touch X <タッチ エックス>

作業領域 160W x 120H x 120D mm 最大提示力 7.9 N 継続的提示力 1.75 N 力覚出力 3自由度 位置・姿勢入力 6自由度
Phantom Premium 1.5 <ファントム プレミアム>

Phantom Premium 1.5 High Force <ファントム プレミアム>
Phantom Premium 1.5 / 6DOF <ファントム プレミアム 6DOF>

作業領域 381W x 267H x 191D mm 最大提示力 8.5 N 継続的提示力 1.4 N 力覚出力 6自由度 位置・姿勢入力 6自由度
Phantom Premium 1.5 High Force / 6DOF <ファントム プレミアム 6DOF>
作業領域 381W x 267H x 191D mm 最大提示力 37.5 N 継続的提示力 6.2 N 力覚出力 6自由度 位置・姿勢入力 6自由度
※備考
- 上記の製品(デバイス本体)は、すべて1年間の保守が付帯されております。 通常使用で故障した場合、センドバック方式(弊社までお送り頂く)にて無償修理を致します。
- 故障の際、代替品のお貸し出しは含まれておりません。
- ハプティクスデバイスを接続されるPCのインタフェースはデバイスによって違いがあり、またハプティクスデバイスとの相性もございます。 お客様自身でインタフェースカードを増設することになるケースもございますので、詳細につきましては、ご購入前に営業・サポート担当までお問合せください。
多点接触シミュレーションシステム 剛(Tsuyoshi)

デバイス Touch×1 ソフトウェア SmartCollision Studio Viewer×1
力覚・ホワイトボード・キット 書(Sho)

デバイス Touch×1 ソフトウェア Phantom文字描画ソフト×1
ハプティクス通信制御開発用システム 連(Ren)
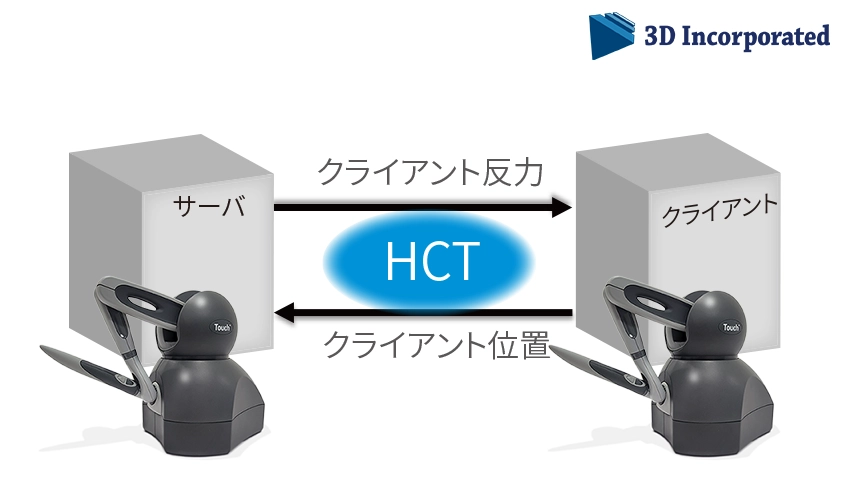
デバイス Touch×2 ソフトウェア Haptics Communication Toolkit×1
3D Systems Customer Support Center サイト
- 3D Systems Customer Support Center にアクセスする。
- はじめてアクセスされる場合には、ログインページの「Register here.」より英語で登録申請をする。
https://support.3dsystems.com/s/login/SelfRegister?language=en_US
https://support.3dsystems.com/
デバイス修理のご依頼
サポート申請フォームよりご連絡ください。折り返し、担当者より連絡をいたします。